
Die globale Kreislaufwirtschaft schrumpft. Es ist höchste Zeit zu handeln. Eine Möglichkeit ist das Recycling technischer Kunststoffe. Dies war jedoch bisher recht umständlich. Wir zeigen Ihnen, wie Kunststoff-Recycling endlich einfach wird.

Die Welt wird immer vernetzter, alles muss zu jeder Zeit verfügbar sein. AI und Chatbots übernehmen immer mehr Aufgaben. Jedoch haben uns die Probleme der Vergangenheit gezeigt, dass Lieferketten gestört werden können und es dann zu großen Problemen kommt. Deswegen haben wir ein weltweites Netz an Produktions- und Lagerstandorten sowie Service Partnern vor Ort aufgebaut, […]

Flughäfen sind auf Gangways angewiesen, um den Passagieren einen bequemen Ein- und Ausstieg in die Flugzeuge zu ermöglichen. Fallen diese aus, ist der Weg in die Kabine deutlich erschwert. Eine Möglichkeit, um Störungen der Gangways zu verhindern, sind e-ketten und i.Sense EC.P Condition Monitoring von igus.

Technische Kunststoffe Technische Kunststoffe sind eine Untergruppe der thermoplastischen Kunststoffe, die sich hinsichtlich ihrer Eigenschaften und ihres Preises (1) von Standardkunststoffen, Hochleistungskunststoffen und Funktionskunststoffen unterscheiden. Sie werden für eine Vielzahl von Anwendungen eingesetzt, darunter Lager, Rollen, Räder, Dichtungen und Formteile (2) Einige Beispiele für technische Kunststoffe sind Polyvinylchlorid (PVC), Polyamid (PA), Polyoxymethylen (POM), Polycarbonat (PC) […]

Ich dachte eigentlich, ich hätte mittlerweile alles erzählt was man so über die Autoglide 5 erzählen kann, aber ….weit gefehlt. Die Autoglide 5 hat noch einen sehr positiven Nebeneffekt im Vergleich zu der Basiskette: Als da wäre: Durch die speziellen Öffnungsstege der Autoglide 5 sind die Auflageflächen oder Gleitflächen grösser geworden. Grössere Gleitflächen bedeutet auch […]
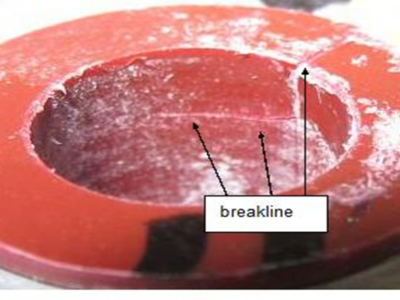
Um Gleitlager formschlüssig in der Aufnahmebohrung zu fixieren, eignet sich ein einseitig – oder bei manchen Ausführungen auch beidseitig angebrachter Kragen oder Bund. Wenn Sie Bundbuchsen in Ihrer Anwendung einsetzen, sollten Sie jedoch einige konstruktive Aspekte berücksichtigen, um Beschädigungen der Lager zu vermeiden. Die Aufnahmebohrung Die Aufnahmebohrung sollte senkrecht zur Oberfläche des Bauteils eingebracht sein. […]
Das Ziel der Reduktion von CO2-Emissionen ist mittlerweile in vielen Unternehmensstrategien verankert. Das ist auch dringend notwendig, allein schon die extremen Wetterlagen in 2021 haben gezeigt, der Klimawandel ist schon lange nicht mehr Theorie oder Zukunftsszenario. Wir sind mittendrin und es kommt auf die Industrie an, wie es sich weiterentwickelt. Auch wir bei igus haben […]

Haben Sie schon einmal ein Kunststoffkugellager gesehen, bei dem die Ringe aus zwei Materialien bestehen? Dieses Zwei-Komponenten-Kugellager ist für Anwendungen gedacht, bei denen hohe Drehzahlen und geringe Geräuschemissionen erforderlich sind. Aber was ist der Vorteil?