Welche Robotertypen gibt es und welcher Roboter ist der Richtige für meine Anwendung?
igu-blog-adm | 6. April 2020

Zeitintensive Aufgaben sind nicht immer komplexe Anwendungen. Die Automatisierung dieser Anwendungen spart Zeit und Geld. Auf dem Markt befinden sich verschiedenste Arten von Industrierobotern; Linearroboter, Delta Roboter, Mehrachsgelenke und Scara Roboter. Dieser Beitrag soll Ihnen einen kurze Übersicht, zu den aktuell auf dem Markt relevanten Robotern geben. Wann setze ich welchen Roboter ein? Worin liegen die Unterschiede? Welche Roboter passt zu meiner Anwendung?
Der modulare Linearrobter, oder auch „Portalroboter“
Linearroboter, auch bekannt als kartesischer Roboter, Portal- oder XYZ-Roboter, sind die am häufigsten verwendeten Roboter in der Industrie. Sie bestehen aus mehreren miteinander verbunden Linearenantriebssytsemen. Häufig sind Sie in der letzten Achse auch zusätzlich mit einer Drehachse ausgestattet.
Der Aufbau ist immer sehr ähnlich; es gibt eine Basisachse (X Achse), eine drauf montierte Querachse (Y Achse) und eine Auslegerachse (Z Achse). Bei der Auslegerachse bewegt sich im Unterschied zu den anderen Achsen das Führungsprofil und nicht der Führungswagen. Oft gibt es die Linearachsen in einer Kombination mit Drehachsen. Linearroboter erreichen 3-4 Freiheitsgrade (3-4 DOF). Die Basisachse gibt es häufig in einer Ausführung mit zwei Achsen, mit einer zusätzlichen Welle, die beide Achsen parallel-synchronisiert. So erreichen Sie mehr Stabilität.
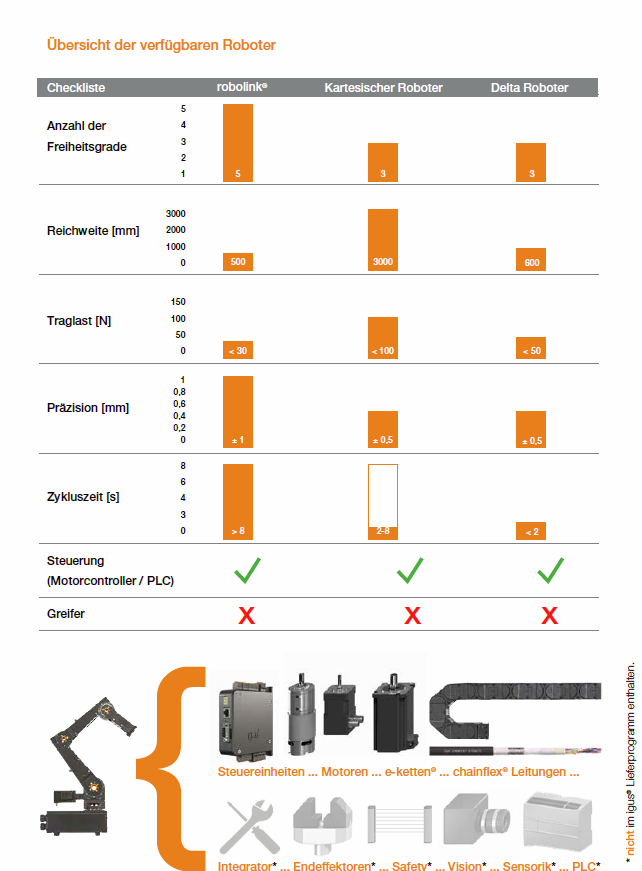
Linearroboter sind im höchsten Maße konfigurierbar und passen sich in jedes Maschinendesign an. Sie erreichen Arbeitsvolumen von mehreren Metern für jede Dimension. Sie sind sehr einfach zu programmieren, da ein Fahrbefehl keine Übersetzung in eine Roboterkinematik bedarf. (Fahrbefehl = Realbewegung des Roboters). Es gibt viele verschiedene Präzisionsklassen. Linearroboter können für nahezu alle Belastungsbereiche eingesetzt werden. In den meisten Fällen händeln Sie Belastungen bis zu 200 N (20 kg). igus Portalroboter werden in den meisten Fällen bei folgenden Anwendungsparametern eingesetzt.:

Diese Roborteart gibt es von igus komplett mit Robotersteuerung, alternativ auch nur mit Motorcontrollern oder optional auch für Kundenmotoren vorbereitet.
Der schnelle Roboter; Parallelkinematiken der Delta Roboter
Delta Roboter, auch Parallel- oder Spinnenroboter genannt, bestehen aus drei Linearsystemen, die zu einem Zentrum aufgebaut arbeiten. Es gibt generell zwei Aufbauten an Delta Robotern:
Delta Roboter mit Linearachsen: Der Vorteil dieser Variante ist die Möglichkeit höherer Prozesskräfte zu erreichen. Zudem wird eine höhere Sicherheit und Laufruhe bei radialen Kräften auf das System ermöglicht.
Delta Roboter mit einer Doppelarm- Prallelkinematik: Hier sind schnellere Geschwindigkeiten und Beschleunigungen durch die geringere Masse möglich. Delta Roboter haben einen speziellen Aufbau, sind schwieriger zu programmieren und aus diesem Grund ausschließlich mit einem Steuerungskonzept erhältlich. Mit einer zusätzlichen Drehachse bestückt erreichen sie max. 3-4 Freiheitsgrade (3-4 DOF).
Delta Kinematiken lassen sich optimal in Pick and Place Anwendungen verwenden. So werden zum Beispiel in der Lebensmittel-, Elektronik- und Pharmaindustrie, Produkte von Förderbändern sortiert oder für Montageprozesse mit Rundförderen.
Parallelkinematiken wie der Delta Roboter können Geschwindigkeiten von bis zu 200 piks/min erreichen bei einer Präzision von 0,5 mm. Dabei müssen Sie jedoch beachten, ob Peripherien, wie Greifer oder Vision Systeme, auch so schnell greifen und loslassen können. Der Delta Roboter von igus ist für Geschwindigkeiten von 60 Piks pro Minute einsetzbar. Das bedeutet er kann bei einer Wiederholgenauigkeit von 0,5 mm jede Sekunde ein Produkt aussortieren. Dies entspricht einer typischen Prozesszeit in der Industrie. Der Roboter wird optional mit einer kompletten Robotersteuerung (igus robot control), mit Motorsteuerungen oder für kundenindividuelle Motoren vorbereitet.

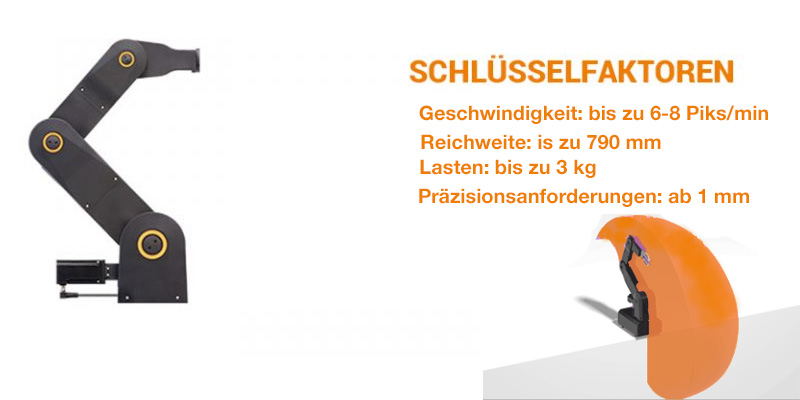
Der Flexible: Gelenkarmroboter
Gelenkarmroboter, oder Knickarmroboter genannt, ist vom Aufbau her dem menschlichen Arm nachkonstruiert und besitzt üblicherweise 4-6 Freiheitsgrade (4-6 DOF). Um eine größere Reichweite des Roboters zu erreichen, werden diese häufig auf eine Linearachse verbaut, die so genannte siebte Achse. Knickarmroboter sind sehr individuell und flexibel einsetzbar. Der Aufbau ist immer fix und lässt sich nicht immer in jede Maschine integrieren. Meist findet der Robotertyp Einsatz außerhalb des Maschinenkonzepts als eigene Lösung.
Typische Anwendungen sind: Palettier-, Greif-, Prüf- oder Schweißanwendungen. Dieser Robotertyp ist in allen Branchen und Industriebereichen wiederzufinden.
Der Gelenkarmroboter ist im Vergleich zu anderen Robotern langsamer, unpräziser und schwieriger zu integrieren, dafür in jeder Anwendung einsetzbar. Mit der Roboterart werden Gewichte bis 250 kg bei einer Präzision von bis zu 0,1 mm gehandhabt. Der igus Gelenkarmroboter robolink lässt sich bei einer Präzision von 1 mm und bei Lasten bis zu 3 kg einsetzen. Es lassen sich Anwendungen mit einer Prozessdauer von 8 Sekunden realisieren. Ein Prozess ist zum Beispiel das Greifen und Ablegen eines Teils.
Der reduzierte Gelenkarmroboter: Scara Roboter
Ein Scara Roboter besitzt vier Freiheitsgrade (4DOF). Es gibt zwei übliche Aufbauten, einen Aufbau bei der der gesamte Arm vertikal verfahren wird und einen, bei dem die letzte Achse vertikal verfahren wird. Alle anderen Achsen sind rotierende Achsen. Der Arbeitsraum dieser Roboterkinematik ist „nierenförmig“. Typische Einsatzgebiete sind Montage- und Fügeaufgaben, wie zum Beispiel in der Elektro-Industrie. In den meisten Fällen wird er für Lasten bis 15 kg benutzt. Aufgrund des Aufbaus liegen die Prozessgeschwindigkeiten zwischen Delta- und Portalkinematik; langsamer als der Delta Roboter, schneller als der Linearroboter.
igus hat keinen standartisieren Scara Roboter im Programm, dieser wird für Kunden aus standartisierten Einzelbaugruppen individuell konfiguriert.
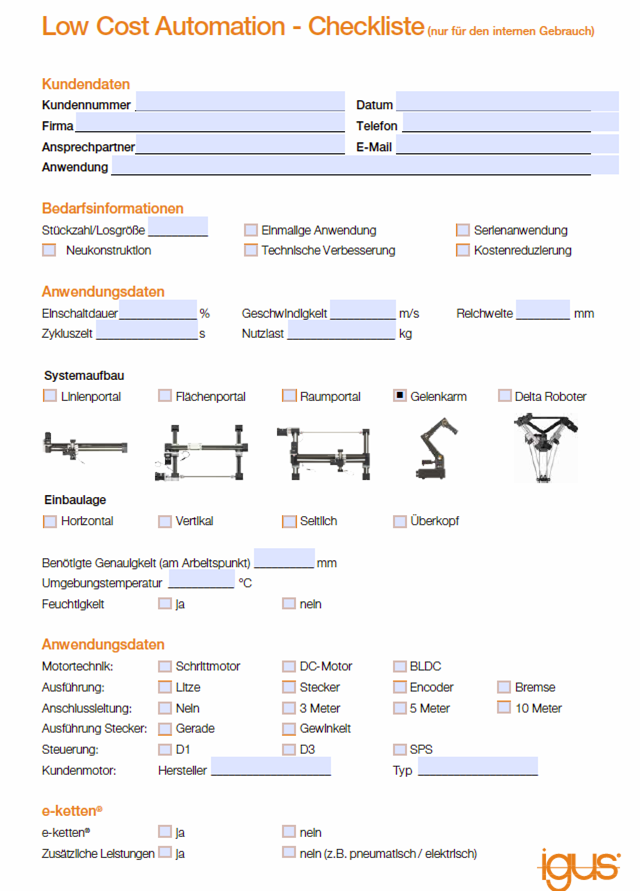
Grundsätzlich gibt es viele Einflussgrößen auf die richtige Auswahl des Roboters. Sie finden diese in unserer Checkliste. Die wichtigsten Einflussgrößen sind:
Benötigte Genauigkeit am Arbeitspunkt
Nutzlast/Traglast
Zykluszeit für den Prozess
Reichweite
Freiheitsgrade
Wichtig bei der Auswahl ist auch nur so viele Freiheitsgrade wie benötigt auszuwählen. Jede weitere Achse bedeutet Programmieraufwand, Komplexität und Fehleranfälligkeit der Roboter. Sprechen Sie uns gerne an, wir beraten Sie kostenlos welche Kinematik zu Ihrer Anwendung passt.
Über den Autor:
Alexander Mühlens
Tel.: +49 2203 9649-8255